Fisheries Management - a Numerical Optimal Control Problem
Uffe Høgsbro Thygesen
2025-12-05
Source:vignettes/FisheriesManagement.Rmd
FisheriesManagement.RmdFisheries as optimal control
Following the textbook (Thygesen 2023), we consider the problem of optimal harvest of a fish stock. Our objective in this vignette is to demonstrate the numerical solution of the optimal control problem. The controlled system dynamics are
Here, is the biomass, and is standard Brownian motion. The term is the growth without fishing, i.e. logistic growth; we have made time and abundance dimensionless. is the harvest rate. We aim to maximize in steady state, which leads to the Hamilton-Jacobi-Bellman equation (Thygesen 2023)
The optimal control is found as a stationary point: .
The analytical steady-state solution to this problem is (Thygesen 2023) where . This leads to the strategy
Numerical analysis of the steady-state problem
We aim to verify the analytical solution numerically. We first set up the model, writing it in advection-diffusion form. We use as the diffusivity and as the advective field.
## Loading required package: SDEtools
sigma <- 0.5
f <- function(x) x*(1-x)
g <- function(x) sigma*x
dg <- function(x) sigma
D <- function(x) 0.5*g(x)^2
dD <- function(x) g(x)*dg(x)
v <- function(x) f(x) - dD(x)The following function gives the optimal control as a function of and :
mu <- function(x,Vp) 0.25/Vp^2We now discretize the problem. We use a grid which is more dense near the origin.
Xmax <- 4
xi <- seq(0,sqrt(Xmax),length=101)^2 # Interfaces between grid cells
xc <- 0.5*(head(xi,-1)+tail(xi,-1)) # Center of grid cellsWe first define the generator without fishing:
G0 <- fvade(v,D,xi,'r')## Loading required package: Matrixand next the generator corresponding to fishing:
G1 <- fvade(function(x)-1,function(x)0,xi,'r')Note that this discretizes the operator .
We are now almost ready to solve the steady-state problem using policy iteration. But first, to make the nummerics more robust, we make two changes: First, at the left cell, we assume that we cannot fish. This avoids the option of driving the fish to extinction and then fish like crazy on fish that aren’t there. Next, we assume that there is a bound on the harvest, even if . We do that by replacing with where is a “small” number.
Finally, we need the pay-off:
k <- function(u) sqrt(u)We can now solve the steady-state problem using policy iteration:
sol <- PolicyIterationSingular(G0,G1,k,uopt,do.minimize=FALSE)We plot the policy and the value function compared with the analytical results:
plot(xc,sol$V,type="l",xlab="x",ylab=expression(V(x)))
lines(xc,0.5*log(xc) - 0.5*log(xc[50]) + sol$V[50])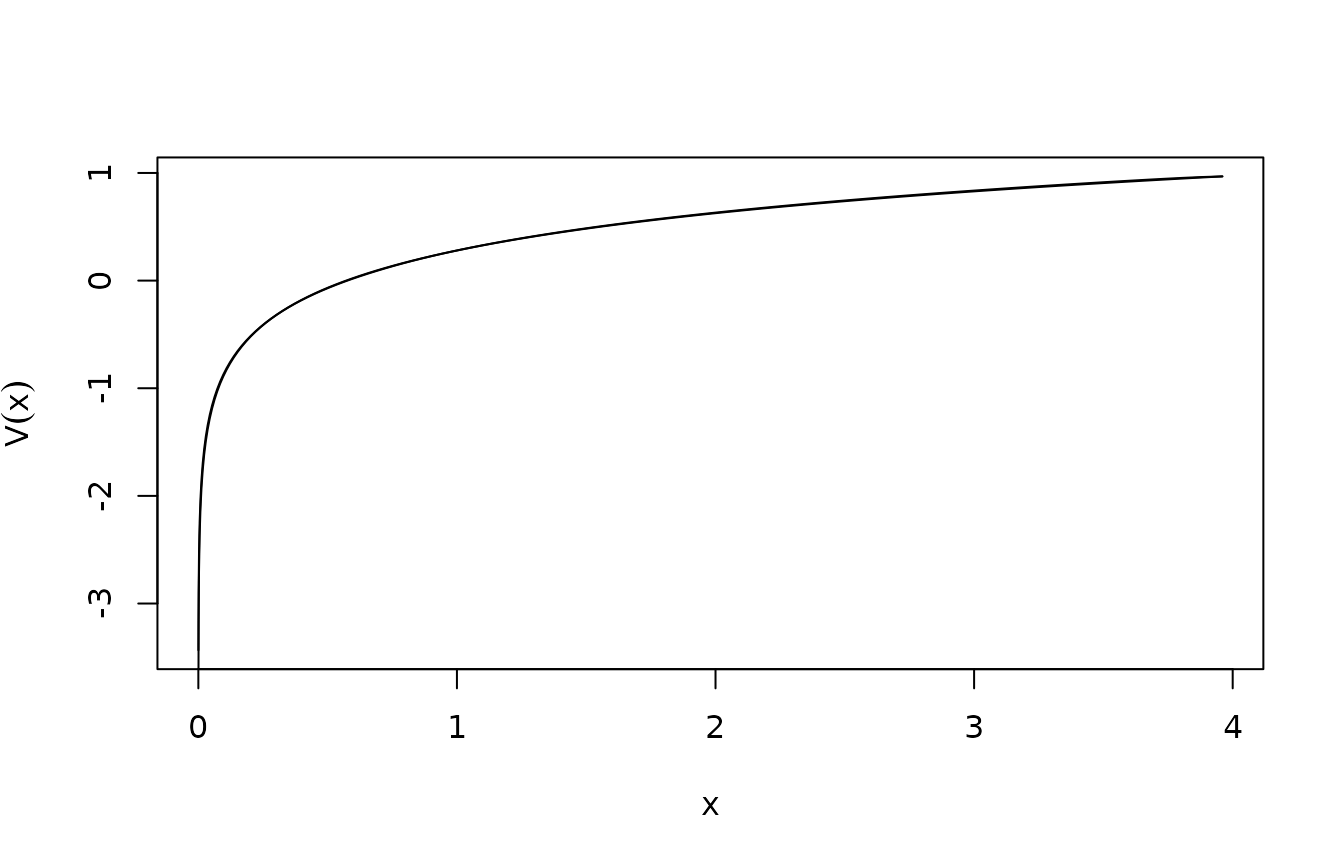
Note the excellent agreement. Similarly, for the control:
plot(xc,sol$u,type="l",xlab="x",ylab=expression(mu(x)))
lines(xc,xc^2,lty="dashed")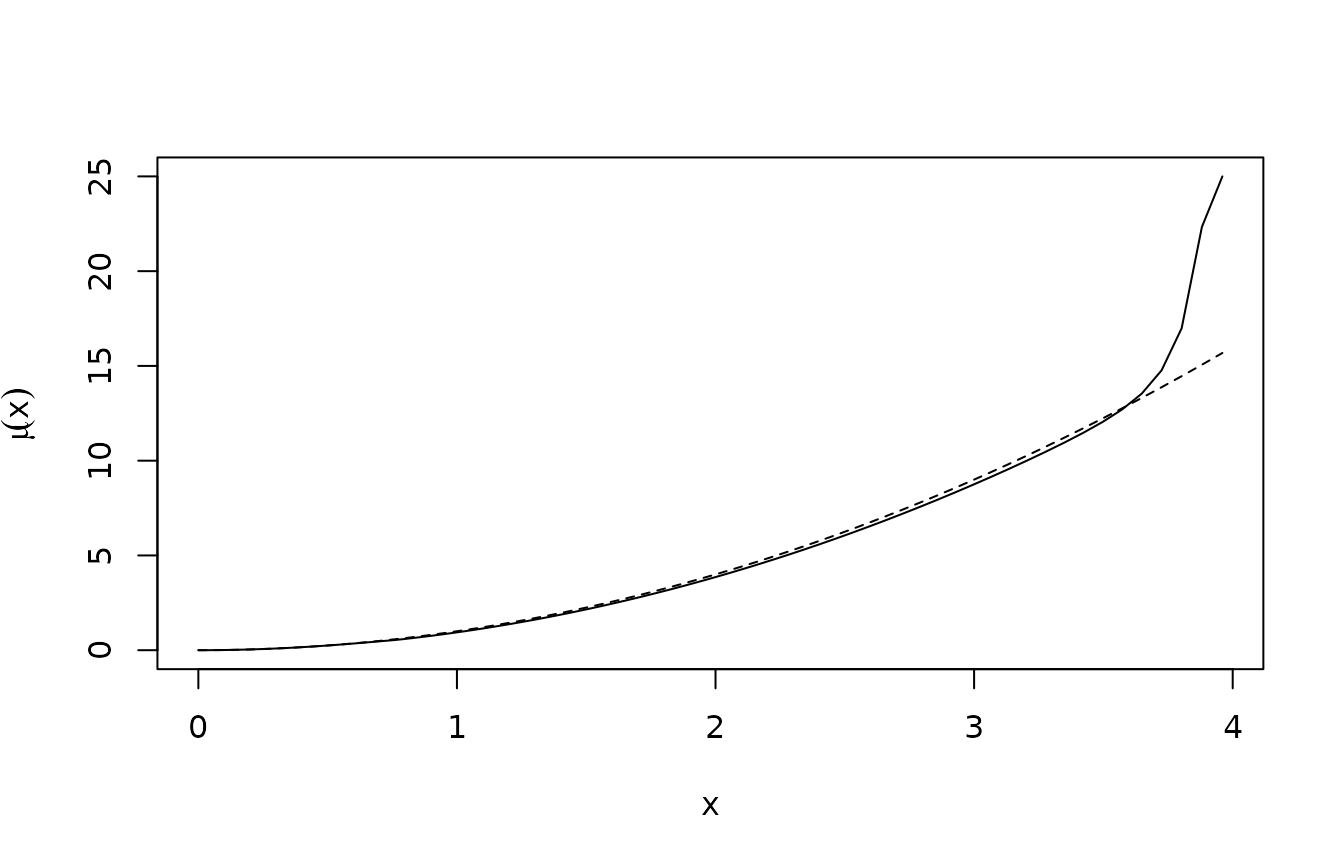
Note that there is some discrepancy at the upper boundary, where the discretized problem fishes really hard to avoid the risk of hitting the boundary, which would be wasteful.
We finally plot the stationary distribution of the state under the time-invariant control.
plot(xc,sol$pi,type="l",xlab="x",ylab="p.d.f.")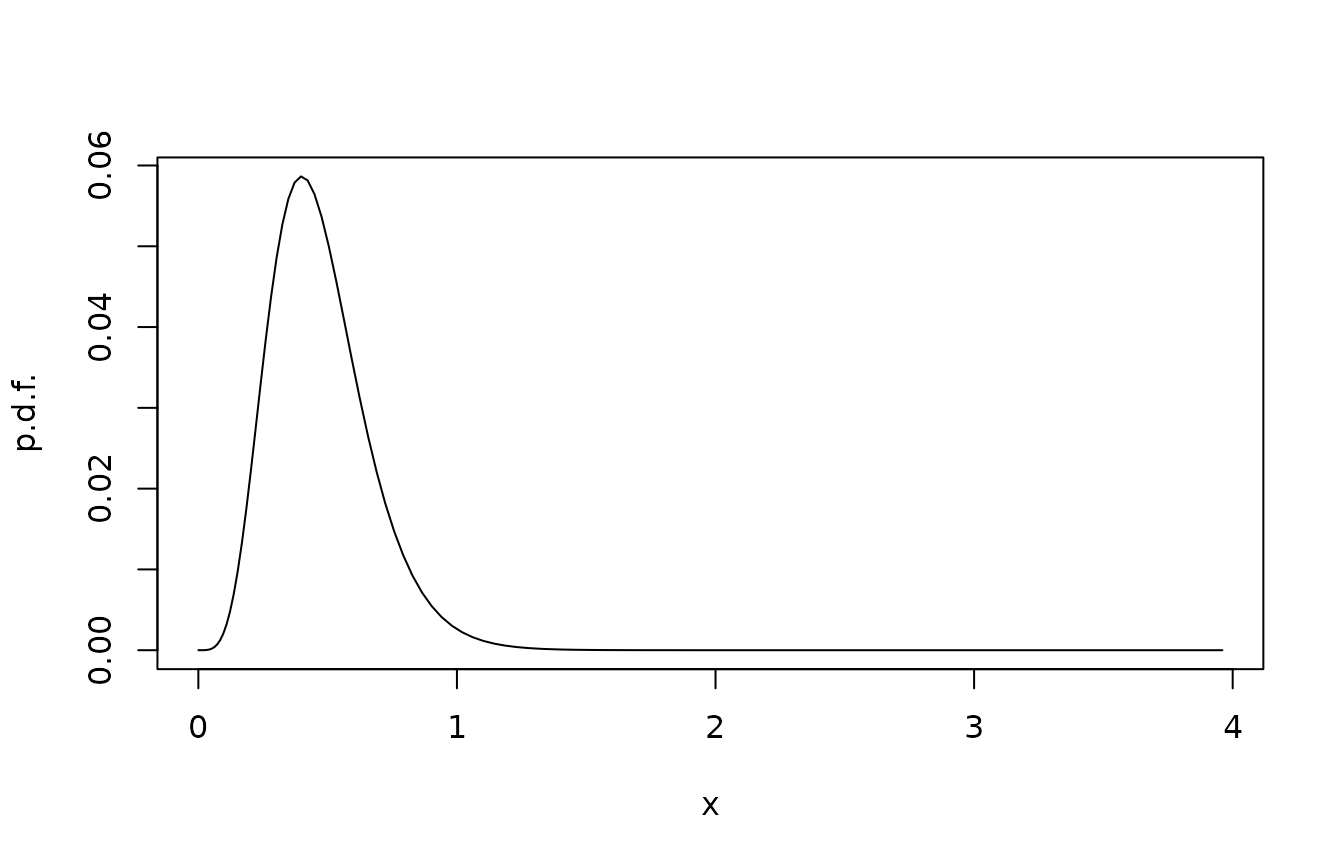
The time-varying problem
Here, we demonstrate how to solve the time-varying HJB equation by time marching. There is no particular reason to do this for this problem, but one could imagine extensions where system parameters vary with time etc. Therefore we include this.
The time-varying problem runs in a backward iteration. We set up arrays for the value function and for the optimal harvest. Here, the row index corresponds to the state, while the column index corresponds to the time. We fill in the last column of with the terminal condition, which we take to be all 0.
The backward iteration works in two steps: First, we use to identify the optimal control . This is specific to the current time step but our notation suppresses this. Next, we assume that this control strategy is applied during the preceding time interval. To this end, we write the equation in the value function as where is the closed loop generator, and is the running reward with the current control strategy. For our example, discretizes the operator where is fixed. Similarly, is a vector that evaluates .
To solve this equation exactly, i.e., without time discretization error, we write it as a coupled system and solve the combined system. Let , then We solve this system using the matrix exponential. The top half elements is the solution at the previous time step.
OO <- sparseMatrix(i=numeric(0),j=numeric(0),x=0,dims=c(length(xc),2*length(xc)))
for(i in length(tv):2)
{
## Find optimal control strategy
u <- uopt(G1 %*% V[,i])
U[,i-1] <- u
## Construct the "closed loop" system that results from applying this control strategy
Gcl <- G0 + Diagonal(x=u) %*% G1
GG <- rbind(cbind(Gcl,Diagonal(n=length(xc),x=1)),OO)
Vkterm <- c(V[,i],k(u))
Vksol <- expm(GG*dt) %*% Vkterm
V[,i-1] <- Vksol[1:length(xc)]
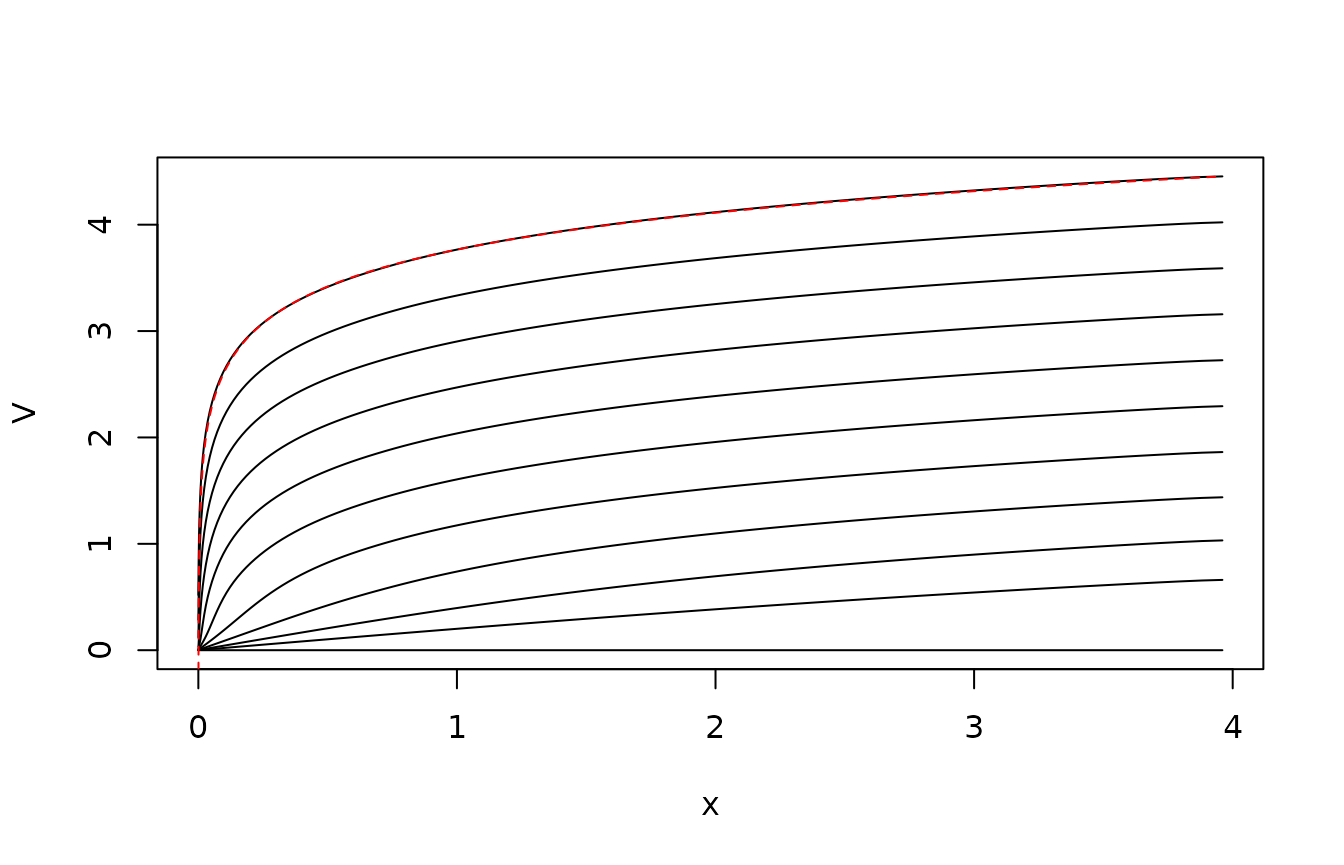
}The following plot shows the value function at the various points in time. Notice that it quite quickly seems to enter a steady state where the value function is just shifted the same amount from each time step to the previous. This reflects that the problem effectively is in steady state here: The control horizon is long compared to the mixing time of the controlled process. The shift corresponds to , the pay-off rate in steady state. The red line is the analytical result from the steady-state problem.
matplot(xc,V,type="l",col=1,lty=1,xlab="x")
lines(xc,0.5*log(xc)-0.5*log(xc[50])+V[50,1],lty="dashed",col="red")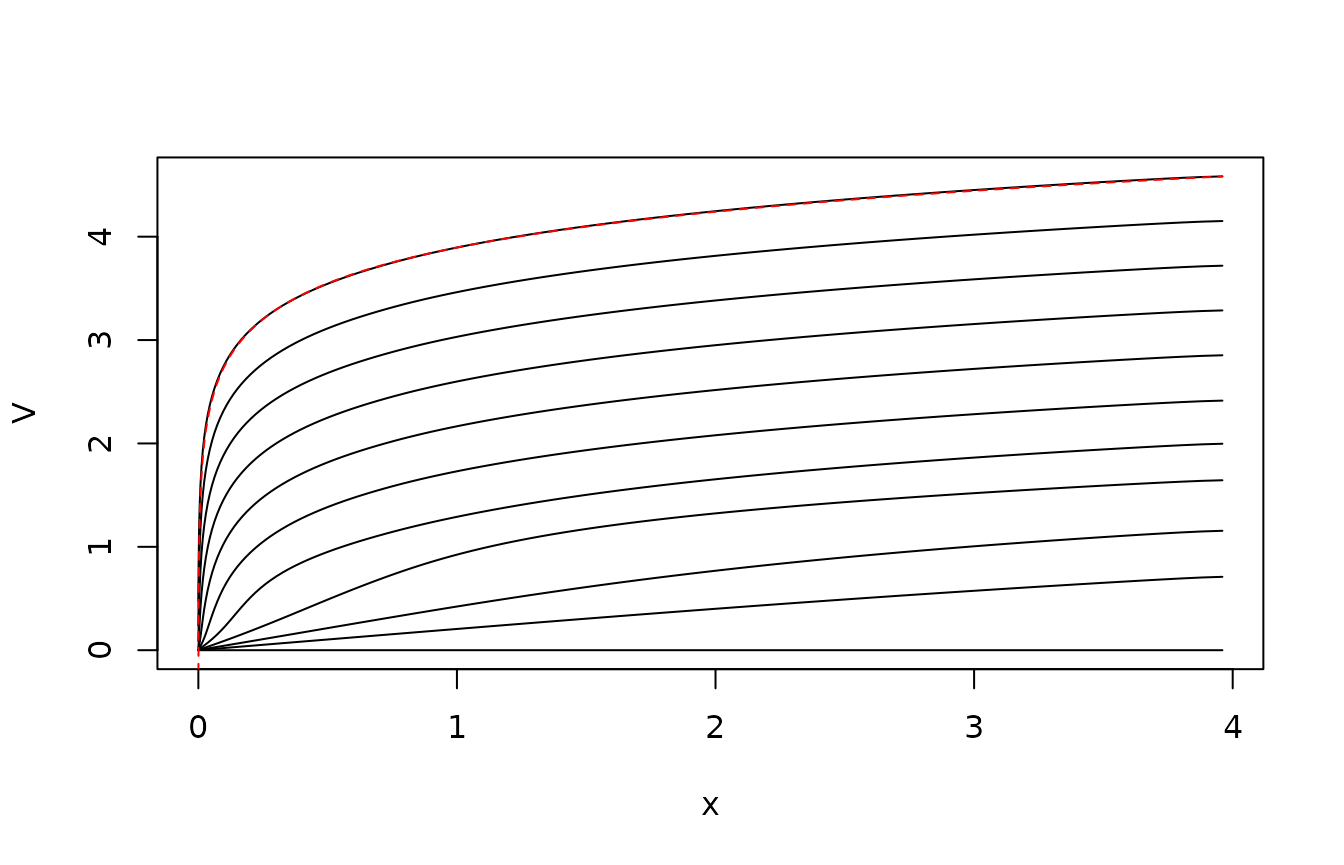
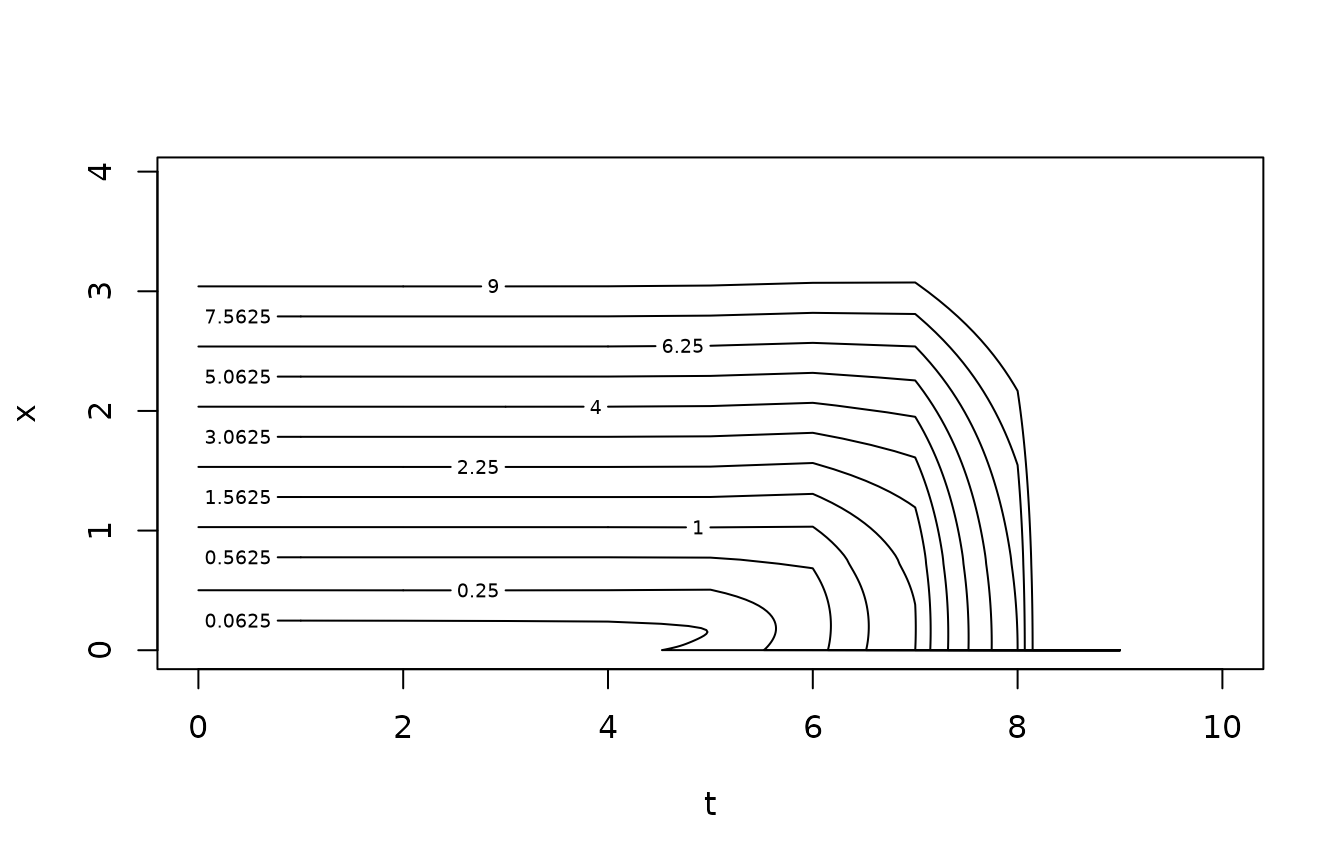
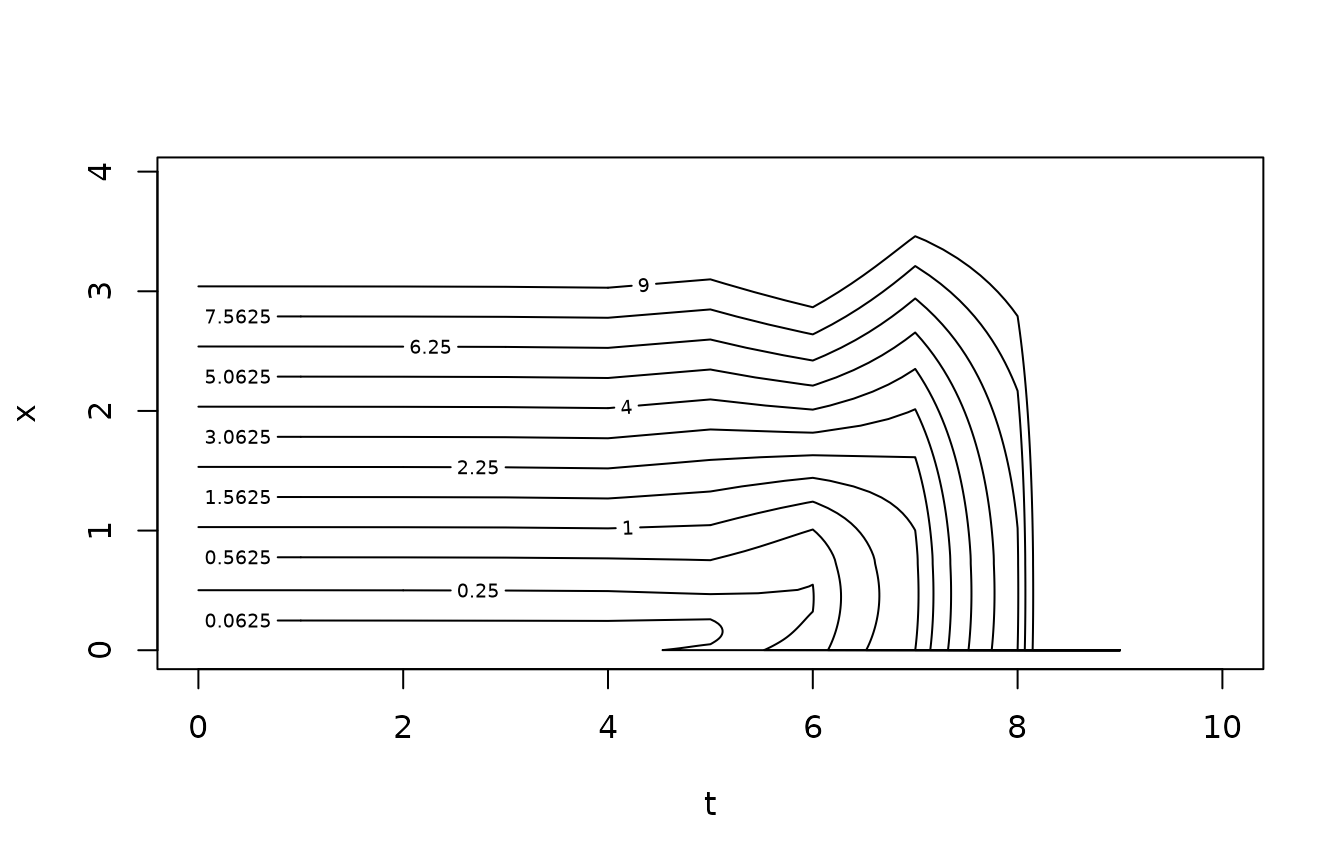
The following contour plot shows the optimal control as a function of time and state. Note that we fish hard when we are close to the terminal time, since this problem does not include a terminal reward for leaving fish in the system at the end of time.
Implicit Euler time stepping
The matrix exponential in the previous is expensive for large problems. So therefore we give here a variant of the code which uses implicit Euler to time step the HJB equation rather than the matrix exponential. The equation is time discretized as
i.e.,
for(i in length(tv):2)
{
## Find optimal control strategy
u <- uopt(G1 %*% V[,i])
U[,i-1] <- u
## Construct the "closed loop" system that results from applying this control strategy
Gcl <- G0 + Diagonal(x=u) %*% G1
V[,i-1] <- as.numeric(solve(Diagonal(n=length(xc),x=1) - Gcl*dt,V[,i] + dt*k(u)))
}We repeat the two previous plots. Note that the transients are slightly different due to the coarse time step, but that the steady state is the same.
matplot(xc,V,type="l",col=1,lty=1,xlab="x")
lines(xc,0.5*log(xc)-0.5*log(xc[50])+V[50,1],lty="dashed",col="red")